Decentralized Intelligent System for Road User Prediction and Tracking
Überblick zum Projekt
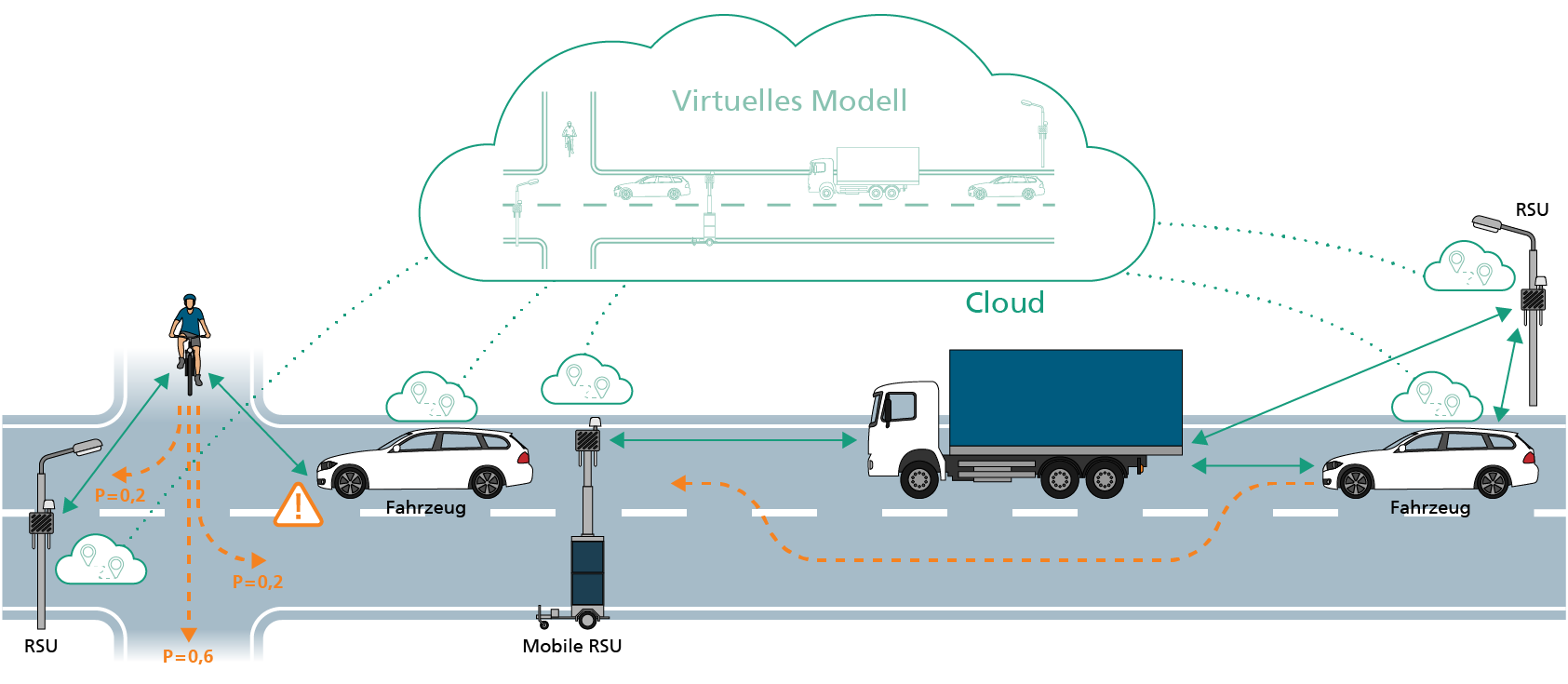
Im Projekt DISRUPT werden Algorithmen entwickelt, welche mittels Fusion von IR-Kamera und Radar-Informationen den Bewegungszustand von Verkehrsteilnehmern möglichst genau bestimmen können. Der so ermittelte Bewegungszustand bildet die Basis, um das Verhalten der Verkehrsteilnehmer mittels neuro-kognitiver Modelle in der nahen Zukunft zu prädizieren. Hierdurch soll es ermöglicht werden, etwaige Gefahrensituationen vorhersagen zu können, um insbesondere verletzliche Verkehrsteilnehmer (Radfahrer, Fussgänger) zu warnen und auf diese Weise die Sicherheit im Verkehr zu erhöhen. Ebenfalls geplant ist eine Visualisierung der augenblicklichen Verkehrssituation.
Die hierzu erforderliche Vernetzung der Sensoreinheiten mit der Warnungs-App wird über eine Datencloud sichergestellt, wobei hierzu eine zuverlässige und effiziente Datenübertragung von hoher Wichtigkeit ist. Ebenfalls zentraler Bestandteil des Projekts ist die Entwicklung eines digitalen Zwillings des im Projekt betrachteten Straßensegments. Der digitale Zwilling ist für die Entwicklung, die Parametrierung und den Test von Algorithmen ein zentrales Werkzeug und kann zudem bei Fragestellung zur Gesamtsystem-Auslegung wertvolle Beiträge leisten. Dies gilt insbesondere für gefährliche Szenarien, welche sich im regulären Straßenverkehr nur selten ereignen und nicht risikolos für Versuche nachgestellt werden können.
Das Projekt DISRUPT wird im Rahmen des Förderprogramms BayVFP Förderlinie Digitalisierung durch das bayerische Staatministerium für Wirtschaft, Landesentwicklung und Energie unter dem Förderkennzeichen DIK0525/01 gefördert. Die Koordination erfolgt dabei durch den Projektträger VDI/VDE-IT.
 |
Projektträger |